结合计算机可编程自动化控制器(CPAC)平台集成的P2P运动控制模式和DDA插补算法,运用otostudio软件设计相应的两轴运动控制程序和HMI界面,经过调试,程序运行良好,定位准确,实现了CPAC平台对两轴伺服系统运动轨迹的精确控制。
随着科学技术的发展,以液压控制电动化的运动控制为代表的制造业,正经历着深刻的创新和改革。随着电力电子技术的进步,出现了多种多样的控制技术,研究运动控制技术的应用具有十分重要的实用价值。
CPAC平台可以运行windows操作系统,在实现高性能多轴相互协作运动和高速Point-to-Point运动控制的同时,实现常规工控机的功能。CPAC运动控制平台应用更广泛,适用于有高速、高精度位置控制要求的场合,如CNC数字控制机床、激光雕刻机、机器人等设备。 1CPAC控制平台的组成结构 CPAC运动控制管理系统由运动控制器(GUC)、触摸屏(HMI)、伺服驱动器、伺服电机、步进驱动器、步进电机、I/o模块组、端子接线板组成,其中硬件平台由运动控制器(GUC)、人机HMI界面和远程输入/输出模块[1]组成,其核心控制器为由FPGA和DsP组成的运动控制器(GUC)。支持多种运动模式,如点位模式、Jog模式、电子齿轮模式、Fo11ow模式和PT模式等,带有16路通用数字输入、16路通用数字输出[2]。
CPAC软件平台otostudio是一种组态化、图形化的开发工具,基于IEC61131-3编程标准,支持指令表语言(IL)、功能块图(FBD)、连续功能图(CFC)、梯形图(LD)、结构化文本(sT)、顺序功能图(sFC)六种编程语言,同时集成了HMI编程工具,便于用户设计开发HMI界面。
CPAC控制管理系统中,P2P模式可以很好地实现点位控制,Jog模式能控制加、减速度的恒速运动,Gear和Fo11ow模式是在主轴运动的基础上做相对运动,PT模式则是做预订轨迹的周期运动。本文选择具有定位准确、控制简单等特点的P2P模式作为系统的运动模式。
为了达到两轴和多轴的合成轨迹的精度要求,需要在普通运动模式的基础上引入插补算法,实现多轴运动的控制。插补就是根据给定进给速度、给定轮廓线形的要求,在轮廓已知点之间,确定一些中间点的方法,称为插补方法或插补原理[4]。限于文章篇幅,选用数字积分法(DDA)作为本设计的插补控制算法。
数字积分法是利用数字积分原理建立起来的一种插补方法[5],基础原理是将曲线在各轴的进给量分段收集起来,当某个轴的值累加到一个指定的量时就将这个轴的进给量进给一步。 从几何意义上可知,函数y=f(l)对l的积分结果,是此函数曲线与坐标轴l所包围的面积F,如图1所示,即:
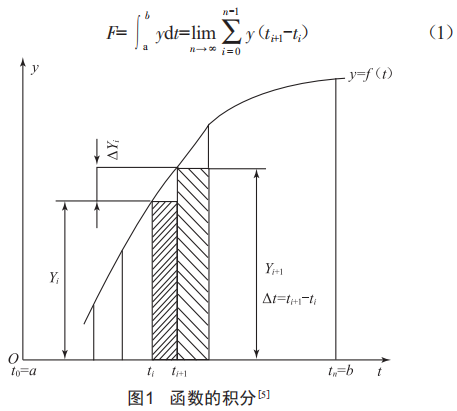
若把自变量区间[a,b]等分成由许多有限的小区间△l(其中△l=li+1-li)组成的区间,求面积F能转换为求小区间面积之和,即:


当所选取的间隔△t足够小时,可以用求和运算代替积分运算的方法,其误差在允许的误差范围内。
DDA插补的第一象限两轴直线插补过程简单描述如下:假设一直线),终点为(xe,ye),合成轨迹方向的切向速度为,X轴和y轴方向上的速度分量分别是,x和,y,则两方向上对应时间△t的移动位置增量为:
动点从起点走向终点的过程,可以看作是经过一个个时间间隔A芒,增量Kλe和KYe累加的结果。经过1次累加后,λ和Y分别都到达终点E(Xe,Ye),下式成立:
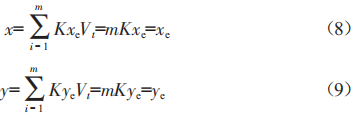

由式(10)可知,比例系数K与累加次数m互为倒数。由于m必须是整数,所以K一定是小于1的小数。在选取K时要考虑每次增量Aλ或AY不大于1,以保证坐标轴上进给脉冲不超过一

若假定存储寄存器是n位,则λe和Ye的最大允许寄存容量应为2n-1(各位全1时)。若取K=1则:
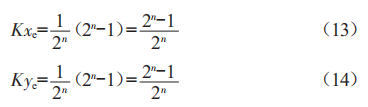
由式(13)(14)能得出Kλe和KYe小于1。这样,决定了系数K=,就保证了Aλ和AY小于1的条件。因此,轨迹从原点到达结束点的累加次数m就有m==2n次。
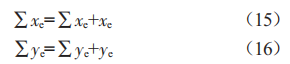
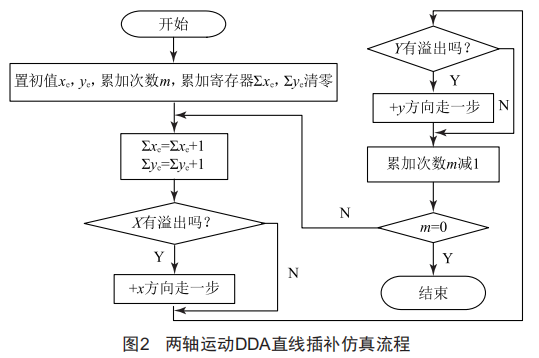
实现两轴运动DDA直线插补时,需要在程序中设定几个存储单元[7],分别用于存放λe和Ye及其累加值Zλe和ZYe。将Zλe和ZYe赋一初始值,在每次插补循环过程中,进行以下求和的
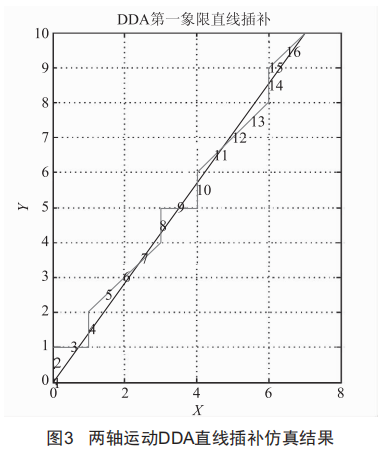
将运算结果的溢出脉冲Aλ和AY用来控制伺服电机转动,两轴运动控制管理系统合成轨迹即所需的直线ab验证两轴运动DDA直线所示,DDA直线所示。取程序中累加值的寄存器位数为4位,用Zλe-16来代表溢出。图3中起点坐标为0(0,0),终点坐标为A(7,10),插补步长为1。
以第I象限逆圆为例,设两轴合成运动轨迹圆弧运动轨迹为AB,半径为R,运动轨迹的切向速度为⑦,P(λ,Y)为动点,如图4所示,经过整理可得:
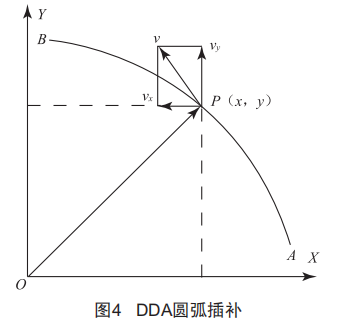
从式(18)(19)能够准确的看出:由于速度分解关系的不同,两轴运动的圆弧插补时的位置增量与两轴运动的直线插补时相比,位移的参量参数发生了变化,λ和Y产生了对调。DDA圆弧插补方法里的位置增量是由当前合成位置坐标(λ,Y)所决定的变量,而直线插补是由终点坐标决定的定值。

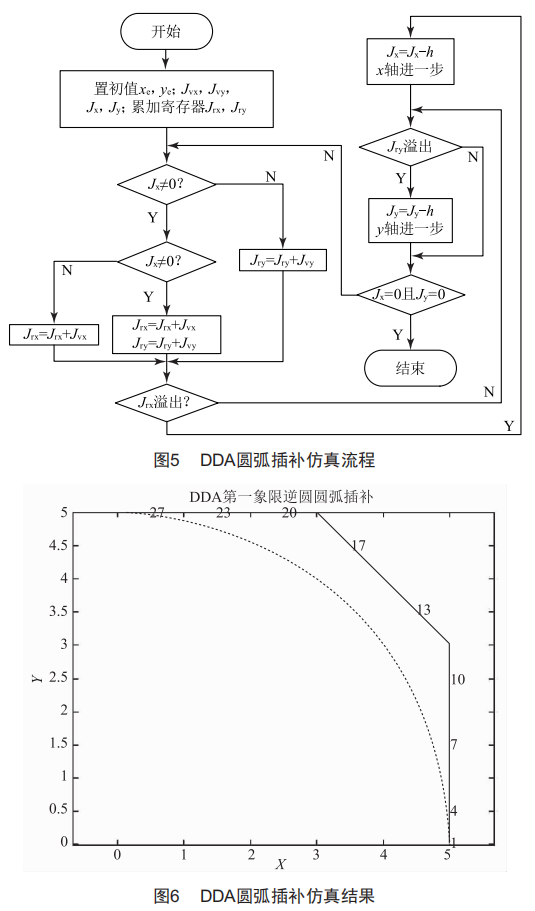
DDA圆弧插补进行Mat1ab仿线所示,仿线所示,得到以原点为圆心、半径为5的第一象限的1/4逆圆圆弧。
由Mat1ab仿真结果能看出,直线插补和圆弧插补程序实际运行轨迹和理论运行轨迹始终在一定的范围内贴近,误差不超过一个步长。实际运行轨迹被分成小段,每段内可以分解为x、y轴两个方向的恒定速度的运行。
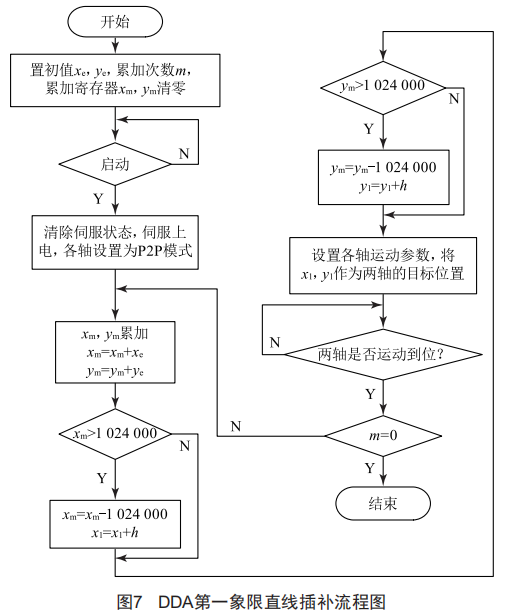
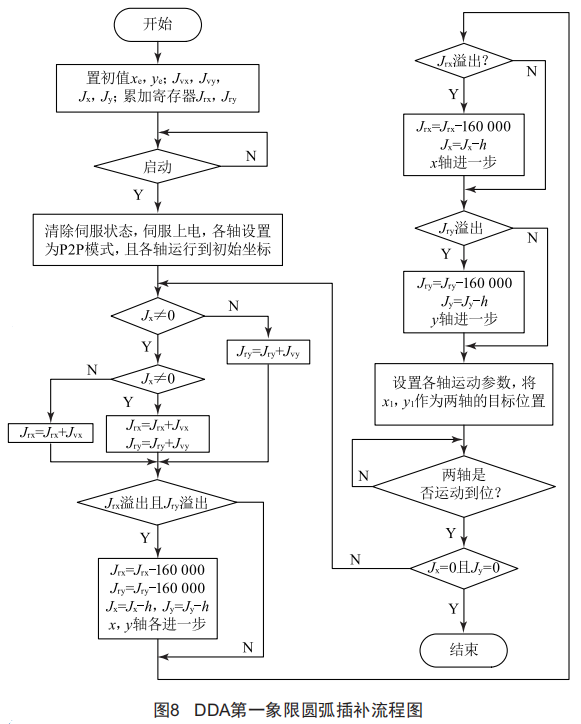
根据上述Mat1ab仿真的插补算法设计的DDA直线所示,DDA圆弧插补程序流程图如图8所示。
经过对otostudio软件的使用,发现在数据监控时,不能监控两轴平面和三轴空间及以上的多维空间位置。下面程序的运行结果采用单轴监控的模式,即一条线代表一个轴的位置状态。
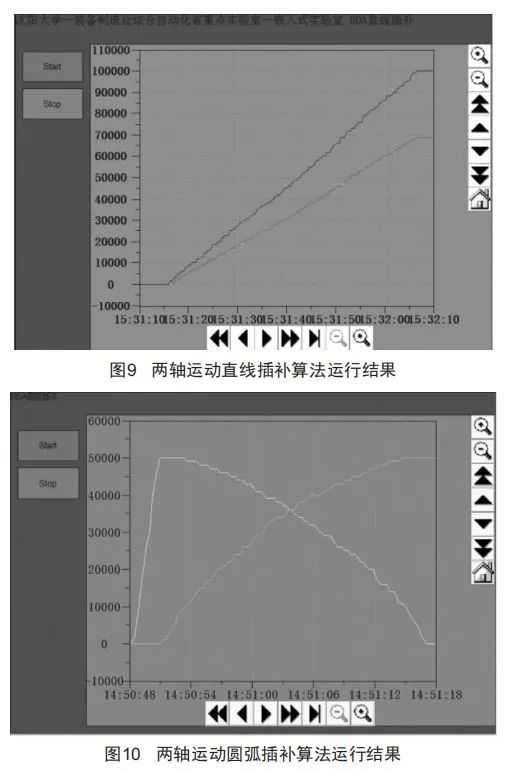
从运行结果能够准确的看出,针对不同的坐标,即使程序中设置的各轴工作速度相同,两个轴也是几乎同时到达终点位置。对比DDA直线插补和DDA圆弧插补的Mat1ab仿真实例,可知实际运行轨迹始终在理论运行轨迹附近不超过一个步长的范围内,证明该程序提高了两轴及多轴运动轨迹的控制精度。
5结语本文基于CPAC运动控制平台来实现对两轴伺服电机的控制,为提高合成运动轨迹的精度,选取了P2P运动模式,引入了两轴直线插补和圆弧插补算法,采用Mat1ab仿真验证了DDA插补算法对于精确运动控制的可行性。在0tostudio软件平台上,实现了P2P运动模式和DDA插补算法控制程序,实现了两轴伺服系统的高精度运动轨迹控制,且程序运行良好,运动轨迹定位准确。
为了满足当今半导体产业的最高的多轴自动化应用的需求,工程师们转而朝向把最好的集成和基于网络的控制属性的运动控制平台方向。 许多先进机器的控制平台,即基于网络和集中控制开始看到从自动化领域里广泛的实践,因为它们需要大量的解决能力和通信带宽,这在几年前微处理器和网络技术是没办法实现的。 在高端多轴自动化行业很多人知道,从20世纪90年代以来的集中式多轴控制器的好处。 使用中央高速处理器,处理协调多轴运动控制已被证明为确定性数字伺服控制的有效架构,使最快的更新率和精密的同步。 另外,网络结构,如CANopen网络的,已经成功地实践在了太阳能电池板划线,半导体制造和通用自动化应用中等需要可扩展性,开放的多厂商和设备,对成本控制敏感的
运动控制技术是制造自动化的关键基础,其水平高低是衡量一个国家工业现代化的重要标志,研究和开发具有开放式结构的运动控制器是当前运动控制领域的一个重要发展趋势。随着集成电路技术、微电子技术、计算机技术和网络技术的持续不断的发展,运动控制器已从以单片机和微处理器作为核心的运动控制器和以专用芯片(ASIC)作为核心处理器的运动控制器,发展到了基于PC机平台的以数字信号处理器(DSP)和现场可编程门阵列(FPGA)作为核心处理器的协处理架构的开放式运动控制器。该控制器将PC机和DSP的信息处理能力与FPGA的外围扩展功能很好的结合在一起,具有信息处理能力强、模块化、开放程度高、运动轨迹控制精确等优点。 1系统概述 该四轴运动控制器系统以TI公司C
器设计与研究 /
中科新松有限公司在第一代协作机器人的设计和研发中整合了Elmo的终极多轴运动控制解决方案 中国的机器人公司“新松”全面采用Elmo终极的运动控制解决方案作为第一代协作机器人的设计,该设计解决了新一代产品研制中遇到的诸多挑战。 想象一下一个机器人完美地模拟一位太极拳大师的动作,动作精准、平滑、充满力感。 考虑一下在真实的工厂里面一个集成协作机器人与人类员工合作的重要意义,这种协作还要满足严苛和强制的安全约束条件。 采用了Elmo独一无二的、高级的伺服驱动技术,这家在中国机器人和自动化领域领先的公司刚刚完成第一代人机协作的工厂自动化机器人的自主研发。 Elmo提供了超小型、功能强大的基于网络型的伺服驱动器,这
1 引言 数字控制机床能轻松实现加工的自动化,比传统机床提高了生产效率,而且加工零件的精度高,尺寸分散度小。我国有广阔的机床数控化改造的市场。本文将通用嵌入式运动控制器用于一台立式铣床X8126 的数控改造试验。改造中保留了原有的主轴系统和冷却系统,用步进电机驱动系统对铣床进行X、Y、Z 三轴数控改造。此次改造后步进距离是0.001mm/脉冲。 2 数控基础原理 2.1 数控系统的工作过程 (1) 把零件加工程序、控制参数和补偿数据等输入给数控系统。 (2) 加工程序译码与数据处理。 (3) 插补。 运动轨迹是多轴协调运动的结果,为实现期望的轨迹,必须控制相关轴的运动。直接的方法是把各轴
开发视觉导引运动系统概述 过去几年里,运动控制管理系统已经把机器视觉作为其关键部分。慢慢的变多的工程师和科研人员认识到当前的机器视觉技术和运动控制技术相结合对于解决复杂应用问题有相当大的帮助。软硬件技术的发展也促进了运动控制和机器视觉系统的结合,并降低了它们的开发难度和开发成本。在设计这种系统时,了解目前的技术发展、方法和开发工具会对您的工作提供很大的帮助。 当您开发一个视觉导引运动控制管理系统时,有很多方面需要仔细考虑。其中重要的一点就是如何建立该系统。比如一个视觉导引运动控制管理系统用于在移动电话上安装机盖,每次电话的位置和方向可能不一样。为了使问题变得简单,假定移动电话放置在X-Y-Theta工作台来校正位置和方向。视
系统 /
概述 EtherCAT(以太网控制自动化技术)是一个以以太网为基础的开放架构的现场总线系统,EtherCAT名称中的CAT为Control Automation Technology(控制自动化技术)首字母的缩写。最初由德国倍福自动化有限公司(Beckhoff Automation GmbH) 研发。EtherCAT为系统的实时性能和拓扑的灵活性树立了新的标准,同时,它还符合甚至降低了现场总线的使用成本。EtherCAT的特点还包括高精度设备同步,可选线缆冗余,和功能性安全协议(SIL3)。 原理 目前有多种用于提供实时功能的以太网方案:例如,通过较高级的协议层禁止CSMA/CD存取过程,并使用
工业运动控制涵盖一系列应用,包括基于逆变器的风扇或泵控制、具有更复杂的交流驱动控制的工厂自动化以及高级自动化应用(如具有高级伺服控制的机器人)。这些系统要检测和反馈多个变量,例如电机绕组电流或电压、直流链路电流或电压、转子位置和速度。在诸如增值功能(如状态监控)等考虑因素中,终端应用需求、系统架构、目标系统成本或系统复杂度将决定变量的选择和所需的测量精度。据报道,电机占全球总能耗的40%,国际法规越来越注重整个工业运动应用的系统效率,因此,这些变量逐渐重要,特别是电流和电压。 本文将根据电机额定功率、系统性能要求及终端应用,重点讨论各种电机控制信号链拓扑中的电流与电压检测。在此情况下,电机控制信号链的实现会因传感器选择、
中的测量技术 /
美国国家仪器有限公司(National Instruments,简称NI)近日推出最新LabVIEW NI SoftMotion模块,有效简化了高级单轴和多轴运动的应用的开发过程。全新NI C系列模块将NI CompactRIO可编程自动化控制器(PAC)平台拓展到可与成百上千个NI和第三方供应商的伺服和步进驱动器相连接。这两个对NI运动系列新产品的补充将LabVIEW图形化编程的简单易用性和I/O功能与基于可编程门逻辑阵列(FPGA)的CompactRIO硬件的用户自定义以及同步功能结合在一起,是高级运动应用的理想平台。 LabVIEW NI SoftMotion 采用高级功能块API (应用程序接口) 便于编
应用 /
器研究
的实时 EtherCAT 主站开发
系统设计
器
嵌入式工程师AI挑战营(初阶):基于RV1106,动手部署手写数字识别落地
有奖直播 瑞萨新一代视觉 AI MPU 处理器 RZ/V2H:高算力、低功耗、实时控制
消息称三星电子在硅谷开设先进处理器实验室,聚焦 RISC-V IP 开发
4 月 19 日消息,据韩媒 Sedaily 报道,三星电子通过旗下三星综合研究院(SAIT,Samsung Advanced Institute of Technology)在美 ...
一、定义与作用视频拼接控制器也称视频处理器,在液晶拼接屏中起了重要的作用,它是大屏拼接系统中的核心设备,但正如主机需要CPU一样,液晶 ...
100W音频功率放大器由运算功率放大器集成电路LM12CLK供电。该单片IC可以向 4Ω 负载提供 80W 正弦波功率,失线%。功率带宽为 ...
构建放大器简单,使用标准且稳定可靠。这里介绍的 75 W 放大器电路能够驱动 4 欧姆,但是,尽管用于 4 欧姆,该放大器的误差非常小 ...
这是一款8Ω负载下的12W小型功率放大器,将NE5534集成技术与晶体管作为V-MOSFET输出级相结合,获得出色的音质。输入灵敏度最大为 3Vrms,1 ...

嵌入式处理器嵌入式操作系统开发相关FPGA/DSP总线与接口数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科


